Technik / Grader-Steuerung - ATS-3D-Tachymeter
 Funktionsprinzip:
Funktionsprinzip:
Die 3D Steuerung basiert auf einem digitalen Geländemodell. Dieses wird für den ständigen Soll- Ist Abgleich in dem Steuerungsrechner im Grader abgespeichert. Die aktuelle Position der Schar wird mehrmals pro Sekunde vom Tachymeter ermittelt und zur automatischen Steuerung an den Grader gefunkt.
Ihr Vorteil:
Reduzierung von Vermessungsarbeiten
Kein Schlagen von Höhenpflöcken, kein Nachmessen, keine Nacharbeit
Verringerung von Material-, Maschinen- und Personalkosten
Größt mögliche Flexibilität, Geschwindigkeit und Qualität bei minimalem Aufwand
Die ATS 3D-Tachymetersteuerung
Hauptkomponente: Tachymeter
Ein vollelektronischer Tachymeter ist heutzutage zum unverzichtbaren Arbeits- und Steuergerät
bei der Erstellung einer Feinplanie geworden, da die ATS- 3D Tachymeter Steuerung die höchste
Genauigkeit bei gleichzeitig größtmöglicher Flexibilität bietet.
Mit einem Tachymeter lassen sich sämtliche anfallende Vermessungsaufgaben erledigen.
So findet ein Tachymeter u.a. seinen Einsatz bei der Ermittlung von Grundstücksflächen über die Vermessung der Grundstücksgrenze, bei der Positionierung von Abwasserschächten und vielem mehr.
Er ist somit nicht nur, für eine auf Fläche bezogene Bauabrechnung unersetzbar, sondern die mittels Tachymeter aufgenommenen Koordinaten bilden auch die Grundlage zur Erstellung eines digitalen Geländemodells.
Beim Einsatz der ATS- 3D Steuerung kommt dem Tachymeter also eine dreifache Bedeutung zu:
- Bei der Arbeitsvorbereitung, zur Erstellung eines DGM.
- Während der Planierarbeiten ermittelt der Tachymeter kontinuierlich die Position des Graders (eigentlich
die Position des RMT) und funkt diese, zur weiteren Verarbeitung im Steuerungsrechner, ständig an
die Baumaschine.
- Die aus dem DGM ermittelte und nach REB- Standard ausgewiesene Fläche dient als
Basis für die Bauabrechnung unserer Arbeitsleistung.
 DGM
DGM
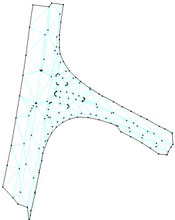
Hauptkomponente: DGM
Ein mittels eines CAD- Programm erstelltes Modell, wie das hier
abgebildete DGM einer Straßenkreuzung, bildet die Grundlage für
den im Steuerungsrechner stattfindenden Soll-/ Ist Vergleich.
Das Modell wird nach den Planungsvorgaben, z.B. gewünschte
Querneigung der Straße, sowie auf Grundlage der im Gelände
vermessenen Grenzen und auszusparender Flächen (z.B.
Verkehrsinseln) angepasst.
Die anschließende Umsetzung in ein vom Steuerungsrechner
akzeptiertes Datenformat findet mit Hilfe spezieller Umsetzungssoftware statt.
Steuerungsrechner
 Hauptkomponente: Steuerungsrechner
Hauptkomponente: Steuerungsrechner
Ein für die ATS- 3D Steuerung entwickelter Steuerungsrechner,
wie z.B. der hier abgebildete GP2 der Fa. Wirth, stellt die ausschlaggebende Komponente im Steuerungsablauf dar.
Seine Verarbeitungsgeschwindigkeit, die Genauigkeit der Steuerungsbefehle, welche wiederum
entscheidend von den verwendeten Berechnungsalgorithmen beeinflusst wird,
und nicht zuletzt auch die unabdingbare Umsetzungssoftware sind maßgeblich
für die Alltagstauglichkeit und für die Qualität des Endergebnis "Feinplanie" verantwortlich.
RMT
 Hauptkomponente: RMT
Hauptkomponente: RMT
Ein RMT (Remote Measuring Target) ist ein aktiver Reflektor für den Tachymeter.
Es wird für sogenannte Robotic-Messungen verwendet.
Ein RMT findet im Vermessungswesen bei der Ein-Mann Vermessung seinen Einsatz.
Der Tachymeter richtet sich stets auf das aktive Ziel aus und es lässt sich somit, in festgelegten
Zeitabständen bzw. ferngesteuert, automatisch eine Messwertaufnahme durchführen.
Bei der ATS 3D- Tachymetersteuerung findet diese Messwerterfassung voll automatisiert und
kontinuierlich statt. Das RMT wird dazu in erhöhter Position an der Scharkante
angebracht und einmalig in Höhe und Lage eingemessen.
Die somit bekannte Position des RMT (und damit der Schar) wird zur Steuerung an das
Fahrzeug gefunkt.
Das hier abgebildete Mehrkanal ATS RMT lässt eine Arbeitsentfernung
Tachymeter- RMT bis zu 700m zu und ist damit auch für den Einsatz auf größeren
Baustellen bestens geeignet.
Gesamtsystem-Funktion
 Der Tachymeter wird an einem geeigneten Standort aufgebaut und eingemessen.
Dabei ist auf sicheren Stand, optische Sichtverbindung (möglichst) über das
gesamte Baufeld und zu mindestens zwei bekannten Festpunkten zu achten.
Der Tachymeter wird an einem geeigneten Standort aufgebaut und eingemessen.
Dabei ist auf sicheren Stand, optische Sichtverbindung (möglichst) über das
gesamte Baufeld und zu mindestens zwei bekannten Festpunkten zu achten.
Im Robotic- Betriebsmodus ermittelt nun der Tachymeter mehrmals pro Sekunde
die Position des am Grader angebrachten aktiven Ziel (RMT) und funkt diese
Koordinateninformation (X, Y, Z) an den Steuerungsrechner der Baumaschine.
Der Rechner verarbeitet neben dieser Lageinformation noch die Sensorwerte
der aktuellen Quer- und Längsneigung der Schar. Maßgeblichen Einfluss auf
die Güte der Planie hat die Qualität des DGM.
Dieses Modell stellt den Sollzustand, also das gewünschte Endergebnis der Planie
dar und dient dem Steuerungsrechner im Fahrzeug somit als Basis für die
Berechnung der notwendigen Steuerimpulse.
Die ATS- 3D Tachymeter Steuerung bietet eine gleichbleibend hohe Genauigkeit
von bis ±5 mm und ist flexibel auf den verschiedensten Baumaschinen einzusetzen.